

Исследователи создали цепочки из наночастиц и полимеров, которые видоизменяются под воздействием магнитного поля. На основе этих цепочек можно создавать гибких роботов и управлять ими удаленно.
Ученые из Университета штата Северная Каролина создали технологию для удаленного управления эластичными роботами. Для этого исследователи составили цепочки из магнитных наночастиц — с их помощью можно управлять эластичными полимерами в трех измерениях.
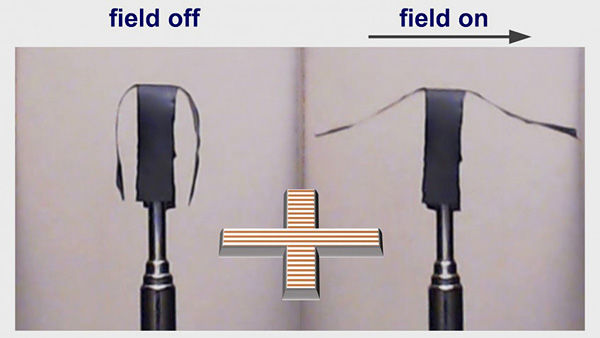
Цепочки встраиваются в структуру эластичных полимеров и формируют магнитный полимерный нанокомпозит. Под воздействием магнитного поля нанокомпозит начинает двигаться, для этого не нужен даже прямой контакт.
«С помощью этой технологии мы сможем создавать массивные нанокомпозиты различной формы, которыми можно будет управлять удаленно», — рассказывает студент Университета штата Северная Каролина и руководитель разработки Самит Мишра. Также он отметил, что цепочки наночастиц хорошо откликаются на воздействие магнитного поля. Его силу и направление удается контролировать, тем самым направляя движения эластичного робота.
По словам исследователей, для этого процесса не нужны дорогие материалы и сложные манипуляции. Магнитное поле также очень легко создать, для этого понадобятся лишь постоянные магниты или электромагниты со стабильным полем.
Гибкие эластичные роботы могут использоваться в области биомедицины и в производстве. Традиционные эластичные роботы получают энергию от электричества или света, тогда как новая разработка этого не требует. По мнению Мишры, магнитное поле менее опасно и не нуждается в никаких дополнительных приспособлениях — в этом главное преимущество технологии.
Результаты исследования были опубликован в журнале Nanoscale. За свое исследование в декабре 2015 Самит Мишра получил награду Gold Graduate Student от Общества по изучению свойств материалов.



